Deep 3D Perception of People and Their Mobility Aids
This website presents our work about detecting people and characterizing them according to the mobility aids they use. It also provides our annotated dataset that contains five classes: pedestrian, person in wheelchair, pedestrian pushing a person in a wheelchair, person using crutches and person using a walking frame.
Publications
-
Marina Kollmitz, Andreas Eitel, Andres Vasquez, Wolfram Burgard
Deep 3D perception of people and their mobility aids
Robotics and Autonomous Systems (RAS), Vol. 114, 2019
DOI BibTeX Manuscript -
Andres Vasquez, Marina Kollmitz, Andreas Eitel, Wolfram Burgard
Deep Detection of People and their Mobility Aids for a Hospital Robot
IEEE European Conference on Mobile Robots (ECMR), Paris, France, 2017
DOI BibTeX Manuscript
Videos
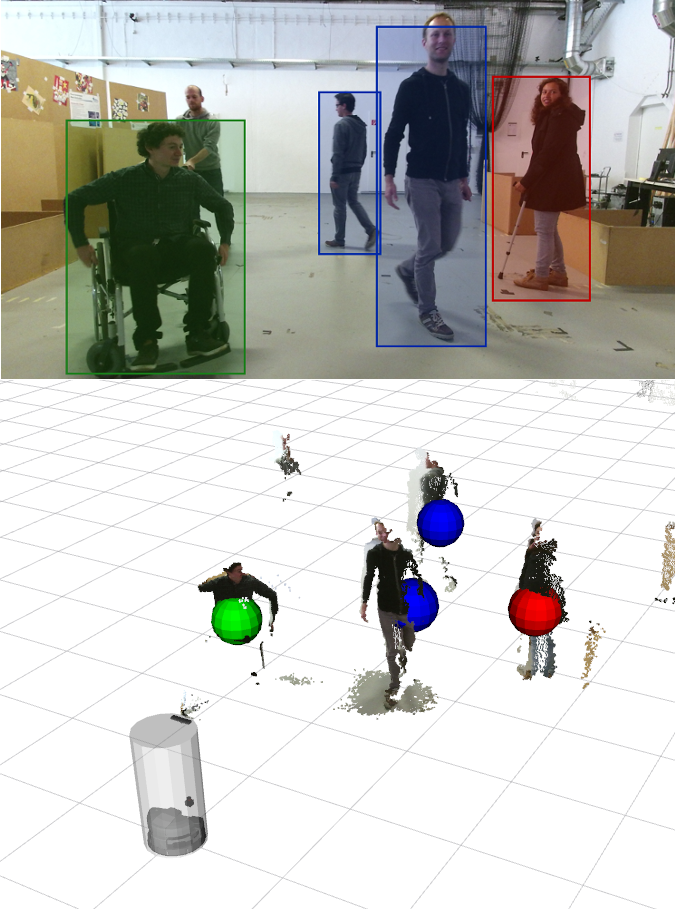
This video shows the 2D bounding box detection as well as the 3D centroid regression performance of our system on an RGB image stream.
Here we show a real-world experiment with our robot Canny, guiding visitors to the professor's office. If the robot perceives that the person is using a walking aid, it guides them to the elevator. Pedestrians are guided to the stairs.
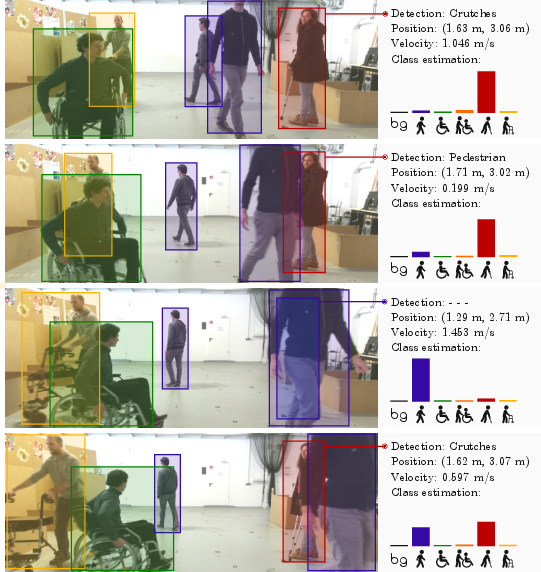
This video shows the performance of our pipeline presented at ECMR 2017 on our MobilityAids dataset and explains some of the underlying concepts.
MobilityAids Code
The mobilityaids code for our 2019 RAS paper is available on GitHub:
- ROS people detector node: mobilityaids_detector
- adapted Detectron code: DetectronDistance
The code for our 2017 ECMR paper is available is also on GitHub:
- ROS people detector node: hospital_people_detector
- adapted Fast R-CNN code: fast-rcnn-mobility-aids
MobilityAids Dataset
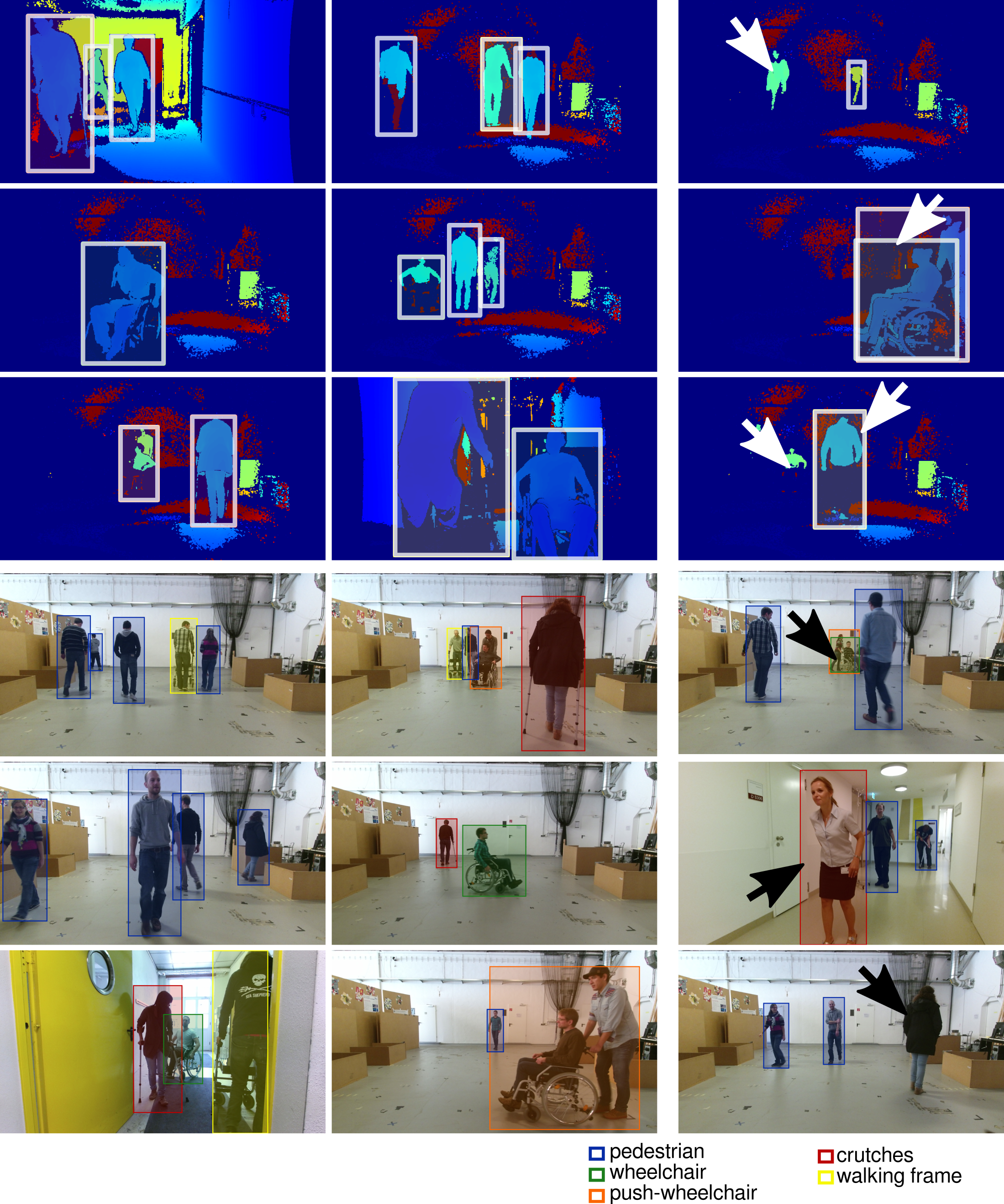
We collected a hospital dataset with over 17'000 annotated RGB-D images, containing people categorized according to the mobility aids they use: pedestrians, people in wheelchairs, people in wheelchairs with people pushing them, people with crutches and people using walking frames. The images were collected in the facilities of the Faculty of Engineering of the University of Freiburg and in a hospital in Frankfurt.
The following image shows example frames of the dataset. On the right, we show successful classifications of our pipeline. On the left, you can see some failure cases with our approach. The top images are DepthJet examples, the bottom images RGB examples.
Mobility Aids Dataset Download
This dataset is provided for research purposes only. Any commercial use is prohibited. If you use the dataset please cite our paper:
@INPROCEEDINGS{vasquez17ecmr,
author = {Andres Vasquez and Marina Kollmitz and Andreas Eitel and Wolfram Burgard},
title = {Deep Detection of People and their Mobility Aids for a Hospital Robot},
booktitle = {Proc.~of the IEEE Eur.~Conf.~on Mobile Robotics (ECMR)},
year = {2017},
doi = {10.1109/ECMR.2017.8098665},
url = {http://ais.informatik.uni-freiburg.de/publications/papers/vasquez17ecmr.pdf}
}
|
Download depth images 960x540 3.8GB
Download depth-jet images 960x540 1.5GB
Download annotations for RGB
Download annotations for RGB test set 2 (occlusions)
Download annotations for depth
Download annotations for depth test set 2 (occlusions)
Download robot odometry for test set 2
Download image set textfiles
Download camera calibration
Download static base-to-camera tranformation
Download README file
The following annotations are taken from the InOutDoorPeople dataset, seq. 0-2, and extended by centroid depth labels. They are not part of our Mobility Aids Dataset, but we used them in addition to the Mobility Aids examples for training our models.
Download InOutDoor training annotations for DepthJet
Download InOutDoor training annotations for RGB